
Motos de 2 Cilindros – Bicilíndrico en paralelo de 180 grados frente a 270 grados: ¿cuál es la diferencia?
¿Quieres descubrir los tipos de motores mas probados para motos? > Tipos de Motores para motos, PROS y CONTRAS
Mas sobre el Mundo 2 Ruedas
La mayoría de las motos deportivas y naked de peso medio de hoy en día vienen equipadas con motores bicilíndricos en línea o bicilíndricos en paralelo. Para los no iniciados, esto significa simplemente que el motor de su motocicleta está equipado con dos cilindros situados uno al lado del otro. Ahora bien, hay varias razones por las que los fabricantes de motocicletas optan por hacer uso de la configuración bicilíndrica en paralelo frente a la configuración bicilíndrica en V más tradicional. En primer lugar, un bicilíndrico en paralelo es sustancialmente más pequeño y compacto, lo que significa que ocupa menos espacio que un motor bicilíndrico en V. Esto da a los fabricantes más libertad a la hora de elegir el motor. Esto da a los fabricantes más libertad de acción a la hora de optimizar el chasis de la moto para una mejor manejabilidad. En segundo lugar, los motores bicilíndricos en paralelo son más baratos de fabricar gracias al hecho de que hay menos piezas que producir.
Ahora bien, aunque los motores bicilíndricos en paralelo son extremadamente eficientes, suficientemente potentes y bastante ligeros, existen varios tipos de configuraciones en lo que respecta al cigüeñal que los fabricantes de motocicletas deciden incorporar en el diseño del motor. Como probablemente habrás notado, la nota exhuberante de, digamos, una Kawasaki Ninja 650 es muy diferente a la de una Yamaha MT-07. Esto no se debe únicamente al sistema de escape. Tiene que ver principalmente con la orientación del cigüeñal que se encuentra en cada uno de estos motores. Echemos un vistazo más de cerca a las similitudes y diferencias entre un motor bicilíndrico paralelo equipado con un cigüeñal de 180 grados y un motor bicilíndrico paralelo equipado con un cigüeñal de 270 grados.

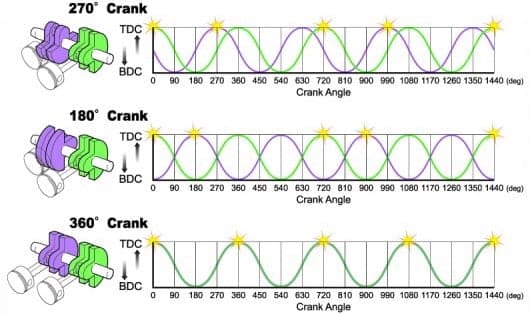
Especialmente para aplicaciones de motocicletas, en las que generalmente el motor es un miembro rígido del bastidor y las vibraciones pueden transferirse directamente al piloto, se requiere un sistema de equilibrado adecuado. Un motor bicilíndrico en paralelo de 360° genera ambas fuerzas: fuerzas libres de masas de primer orden y fuerzas libres de masas de segundo orden. Las fuerzas de masa de 1er orden pueden compensarse mediante un eje equilibrador, que es lo más habitual; la implementación de un peso equilibrador alternativo eliminaría ambas, pero presenta ciertos inconvenientes como la complejidad, la fricción y las excitaciones adicionales.
Un desplazamiento de 180° de la muñequilla del cigüeñal produce momentos de masa de primer orden y fuerzas de masa libres de segundo orden. Además, un orden de encendido desigual produce inconvenientes en el ruido del orificio y excitaciones en otros órdenes.
La opción de un desplazamiento de 90° de la muñequilla del cigüeñal en un motor de 2 cilindros en línea presenta un diseño sin fuerzas libres de masa de 2º orden, por un lado, pero con pequeños momentos de masa y una distribución desigual del encendido, por otro.
Este artículo investiga la diferencia en el comportamiento NVH entre los motores de 2 cilindros en línea de 360°, 270° y 180° por medio de simulaciones de diseño y montaje del motor y muestra los resultados comparativos de las vibraciones estructurales, el ruido aéreo y el ruido de orificio de estas 2 versiones que tienen el mismo diseño básico y las mismas especificaciones del motor medidas en un dinamómetro acústico de chasis.
Los Efectos en el mundo real
Ahora, todo esto puede sonar extremadamente técnico, y eso es porque lo es. Hay montones de vídeos en Internet que ilustran a la perfección las diferencias entre las dos configuraciones de motor. Dicho esto, hablemos de las aplicaciones en el mundo real de las dos configuraciones de motor. Para empezar, hasta hace poco, el bicilíndrico en paralelo de 180 grados era una configuración de motor mucho más común que el de 270 grados. En la mayoría de los casos, un bicilíndrico en paralelo equipado con un cigüeñal de 180 grados proporciona una entrega de potencia muy lineal, con el par y la potencia máximos hacia la parte alta de la gama de revoluciones. También produce una nota de escape bastante apagada, parecida a la de un cortacésped o a la de un motor monocilíndrico de altas revoluciones.
Por otro lado, un motor bicilíndrico en paralelo equipado con un cigüeñal de 270 grados es mucho más similar a la entrega de potencia de un motor bicilíndrico en V de 90 grados, como el que encontrarías en motos como la Ducati Monster, así como en las primeras motos deportivas Ducati. Esto significa que la potencia y el par máximos se alcanzan en la gama media, lo que se traduce en una conducción más ágil y sensible, especialmente en ciudad. Además, el escape de un bicilíndrico en paralelo a 270 grados es mucho más potente y suena de forma muy similar al de un motor bicilíndrico en V.
También vale la pena señalar que el cigüeñal de 270 grados elimina lo que se conoce como par de inercia. En un bicilíndrico paralelo de 180 grados, el hecho de que ambas muñequillas del cigüeñal estén en extremos opuestos significa que el cigüeñal se ralentiza ligeramente en el punto muerto superior y en el punto muerto inferior. El resultado es un motor que se siente pesado al accionar el acelerador y, en algunos casos, con muchas revoluciones. En una configuración de 270 grados, el hecho de que las muñequillas del cigüeñal estén separadas 270 grados entre sí elimina este efecto inercial, proporcionando así una respuesta más directa del acelerador.